改写后的标题:字节推出Vi-PRoM视觉预训练方案,提升机器人操作成功率和效果
 发布于2023-09-23 阅读(0)
发布于2023-09-23 阅读(0)
扫一扫,手机访问
近年来,大规模真实世界数据的视觉预训练取得了显著的进展,在基于像素观察的机器人学习中显示出巨大的潜力。然而,这些研究在预训练数据、方法和模型方面存在差异。因此,哪种类型的数据、预训练方法和模型可以更好地辅助机器人操控仍然是一个未决的问题
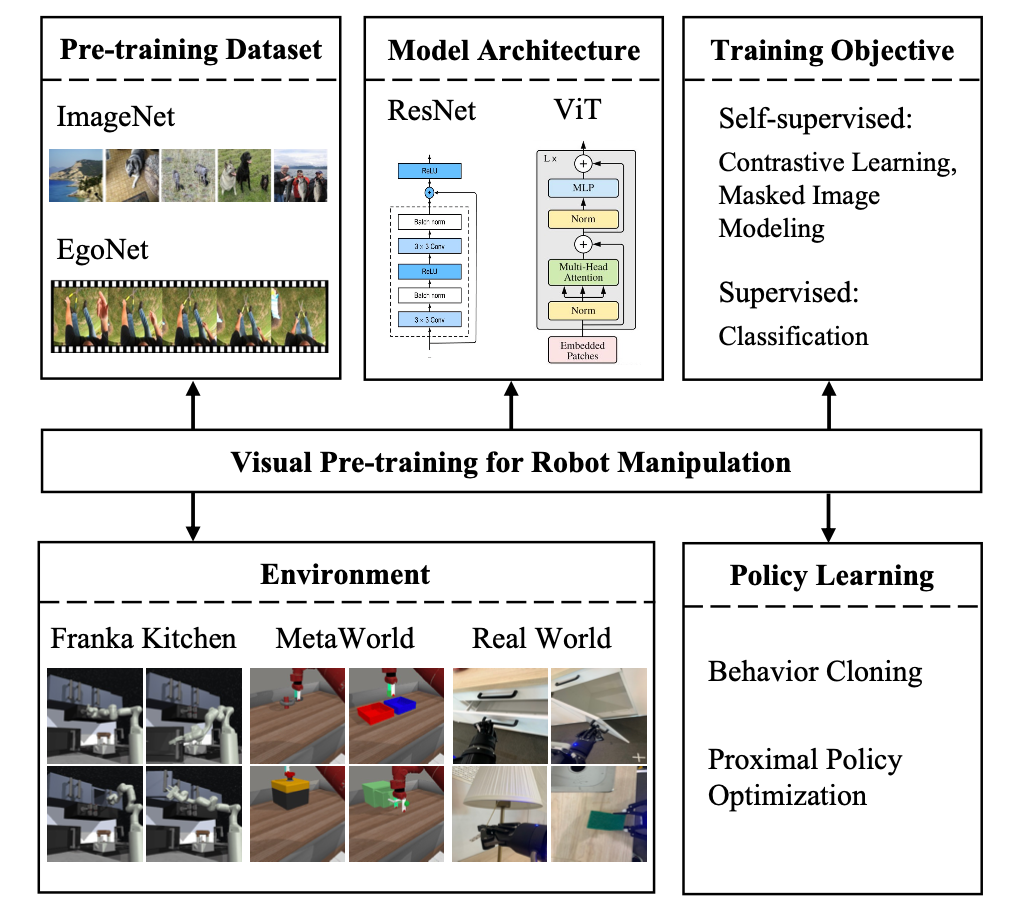
基于此,ByteDance Research 团队的研究者从预训练数据集、模型架构和训练方法三个基本角度全面研究了视觉预训练策略对机器人操作任务的影响,提供了一些有利于机器人学习的重要实验结果。此外,他们提出了一种名为 Vi-PRoM 的机器人操作视觉预训练方案,它结合了自监督学习和监督学习。其中前者采用对比学习从大规模未标记的数据中获取潜在模式,而后者旨在学习视觉语义和时序动态变化。在各种仿真环境和真实机器人中进行的大量机器人操作实验证明了该方案的优越性。
- 论文地址:https://arxiv.org/pdf/2308.03620.pdf
- 项目地址:https://explore-pretrain-robot.github.io/
基准研究
预训练数据
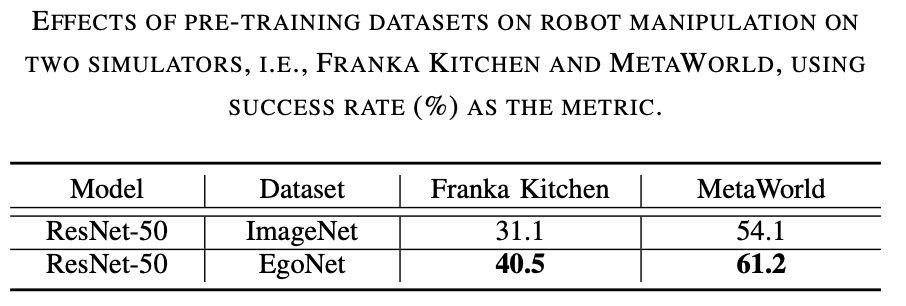
EgoNet比ImageNet更強大。通過對比學習方法在不同的數據集(即ImageNet和EgoNet)上預訓練視覺編碼器,並觀察它們在機器人操作任務中的表現。從下表1中可以看到,在EgoNet上預訓練的模型在機器人操作任務上取得了更好的性能。顯然,機器人在操作任務方面更傾向於視頻中包含的互動知識和時序關係。此外,EgoNet中以自我為中心的自然圖像具有更多關於世界的全局背景,這意味著可以學習更豐富的視覺特徵
模型结构
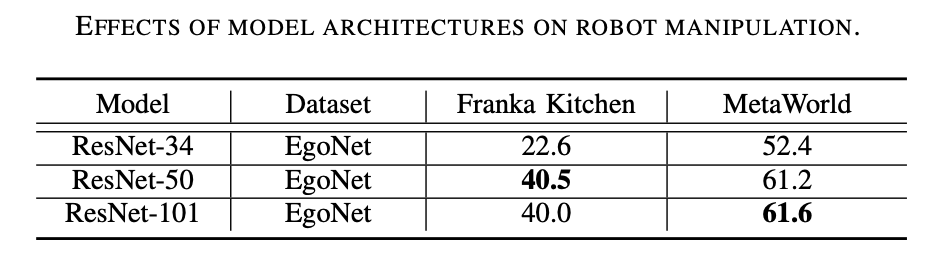
ResNet-50 表现更好。从下表 2 中可以看出 ResNet-50 和 ResNet-101 在机器人操作任务上的表现优于 ResNet-34。此外,随着模型从 ResNet-50 增加到 ResNet-101,性能并没有提高。
预训练方法
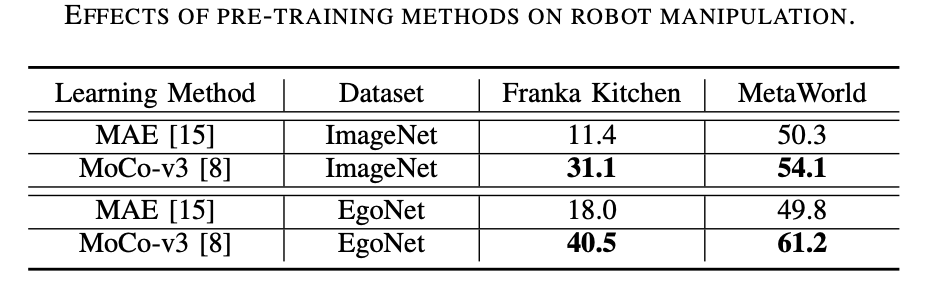
根据原文的意思,需要重写的内容是:“预训练方法首选对比学习。如下表 3 所示,MoCo-v3 在 ImageNet 和 EgoNet 数据集上均优于 MAE,这证明了对比学习与掩模图像建模相比更有效。此外,通过对比学习获得的视觉语义对于机器人操作来说比通过掩模图像建模学习的结构信息更重要。” 重写后的内容: 对比学习是首选的预训练方法。从表3中可以看出,MoCo-v3在ImageNet和EgoNet数据集上都优于MAE,这表明对比学习比掩模图像建模更有效。此外,对比学习所获得的视觉语义对于机器人操作来说比掩模图像建模所学习的结构信息更重要
算法介绍
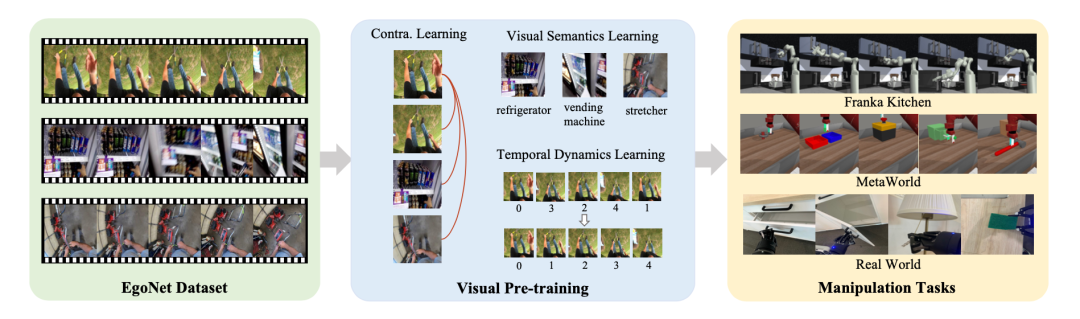
基于上述探索,该研究提出了一种针对机器人操作的视觉预训练方案(Vi-PRoM)。该方案通过在EgoNet数据集上对ResNet-50进行预训练,来提取机器人操作的全面视觉表示。具体而言,首先采用对比学习的方式,通过自我监督从EgoNet数据集中获取人与物体的交互模式。然后,提出了两个额外的学习目标,即视觉语义预测和时序动态预测,以进一步丰富编码器的表示。下图展示了Vi-PRoM的基本流程。值得注意的是,该研究不需要手动标注标签来学习视觉语义和时序动态
实验结果
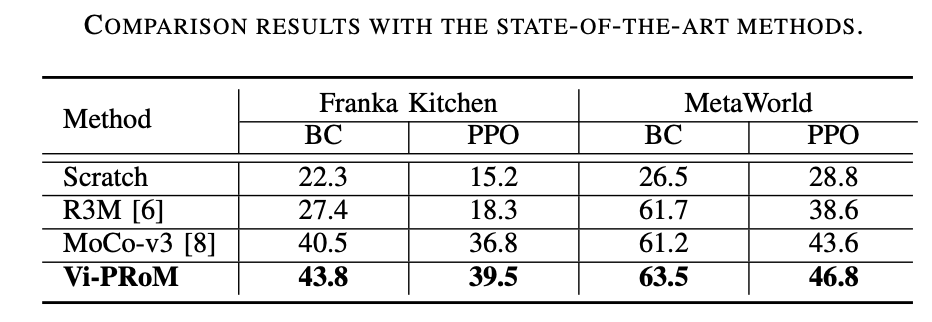
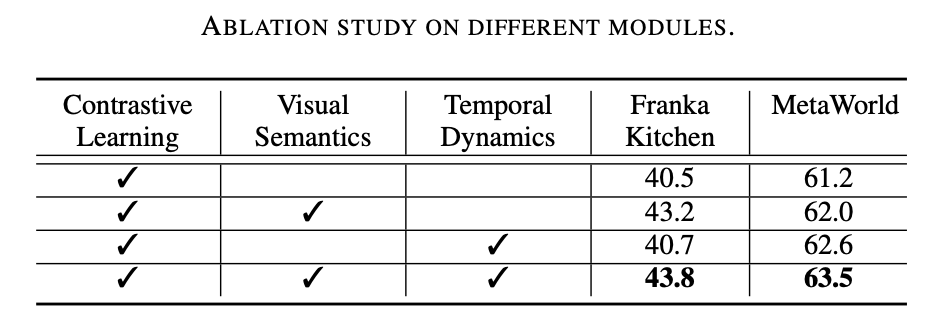
该研究工作在两种仿真环境 (Franka Kitchen 和 MetaWorld) 上进行了广泛的实验。实验结果表明所提出的预训练方案在机器人操作上优于以前最先进的方法。消融实验结果如下表所示,可以证明视觉语义学习和时序动态学习对于机器人操作的重要性。此外,当两个学习目标都不存在时,Vi-PRoM 的成功率会大大下降,证明了视觉语义学习和时序动态学习之间协作的有效性。
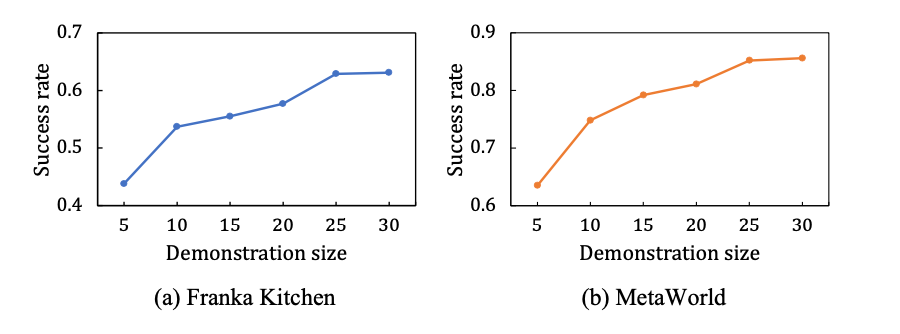
该工作还研究了 Vi-PRoM 的可扩展性。如下左图所示,在 Franka Kitchen 和 MetaWorld 模拟环境中,Vi-PRoM 的成功率随着演示数据规模的增加而稳步提高。在更大规模的专家演示数据集上进行训练后,Vi-PRoM 模型显示了其在机器人操作任务上的可扩展性。

由于 Vi-PRoM 强大的视觉表征能力,真实机器人能够成功地打开抽屉和柜门
Franka Kitchen 上的实验结果可以看出,Vi-PRoM 在五个任务上都比 R3M 具有更高的成功率和更高的动作完成度。
R3M:
Vi-PRoM:
在 MetaWorld 上,由于 Vi-PRoM 的视觉表示学习了良好的语义和动态特征,它可以更好地用于动作预测,因此相比 R3M,Vi-PRoM 需要更少的步骤来完成操作。
R3M:
Vi-PRoM:

产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- 欧易usdt怎么提现到钱包
- 可以通过欧易官方网站或移动应用程序登录欧易账户,选择"财务中心"->"提币"->选择"USDT"->输入提币地址和金额->选择网络->输入谷歌验证码->确认提币,完成提现。
- 7分钟前 0
-
正版软件
- 灰度是干什么的
- 灰度是指图像中介于黑色和白色之间的颜色范围,其作用在于创造深度、纹理和阴影,增强视觉逼真度。灰度级表示灰度范围内颜色的数量,通常为256级,更多灰度级可带来更高细节度。灰度图像优点包括存储空间小、处理速度快,广泛应用于图像处理、医学成像、摄影、图形设计、科学研究等领域。
- 17分钟前 0
-
 正版软件
正版软件
- 比特币合约锁仓教程
- 比特币合约锁仓是一种将比特币合约锁定在特定价位,以获取收益的手段。该教程详细列举了五个步骤:选择平台、选择合约、设置参数、提交订单和管理锁仓。用户应谨慎操作,使用与自身风险承受能力相符的杠杆率,并实时监测锁仓订单,根据市场情况调整策略。
- 31分钟前 0
-
 正版软件
正版软件
- 莱特币电子钱包地址
- 莱特币电子钱包地址是一个唯一的字符串(L开头,由34个字母数字组成),用于接收和发送莱特币,类似银行账户号码。可以通过钱包、地址生成器或交易所获得莱特币地址。使用该地址发送或接收莱特币时,须确保保护好私钥,以确保资金安全。
- 51分钟前 0
-
 正版软件
正版软件
- 莱特币历史最高最低价格
- 莱特币的历史最高价为2017年12月19日的375.29美元,最低价为2015年4月14日的0.47美元。价格变动受比特币价格、供求关系、开发者活动和市场情绪等因素影响。
- 1小时前 13:54 0
最新发布
-
 1
1
- 阿里追捧的中台,“热度”退了?
- 1983天前
-
 2
2
- Overture设置踏板标记的方法
- 1820天前
-
 3
3
- 思杰马克丁取得CleanMyMac中国区独家发行授权
- 1810天前
-
 4
4
- IBM:20万台Mac让公司职工在工作中更快乐 更多产
- 2008天前
-
 5
5
- 报道称微软一直在悄然游说反对“维修权”立法!
- 1974天前
-
 6
6
- 美国怀疑华为窃取商业机密 华为:身正不怕影子斜
- 1970天前
-
 7
7
- 三星被曝正与联发科接洽 A系列手机有望搭载其5G芯片
- 1985天前
-
 8
8
- 环球墨非完成千万级融资 联合企业集团投资
- 2006天前
-
 9
9
相关推荐
热门关注
-

- Xshell 6 简体中文
- ¥899.00-¥1149.00
-

- DaVinci Resolve Studio 16 简体中文
- ¥2550.00-¥2550.00
-

- Camtasia 2019 简体中文
- ¥689.00-¥689.00
-

- Luminar 3 简体中文
- ¥288.00-¥288.00
-

- Apowersoft 录屏王 简体中文
- ¥129.00-¥339.00