新标题:逐际动力推出全新四轮足机器人产品,瞄准中国未开发的巨大市场潜力
 发布于2023-10-01 阅读(0)
发布于2023-10-01 阅读(0)
扫一扫,手机访问
通用足式机器人公司逐际动力LimX Dynamics正式发布首款全自研「四轮足机器人W1」,这是一款基于逐际动力「运动智能Motion Intelligence」开发的颠覆性产品,搭载全球顶尖的感知和运动控制算法,把腿式和轮式结构的优势结合于一身,配置多款全自研的高性能关节,实现了强大的实时地形感知与全地形移动能力,大幅提高足式机器人的作业能力。通过这款四轮足产品,逐际动力瞄准中国潜力巨大的空白市场,抓住先机,为工业巡检、物流配送、特种作业、科研教育等to B客户带来直击痛点的应用体验。逐际动力W1将于今年第四季度开始接受预订。
 逐际动力发布首款四轮足机器人W1
逐际动力发布首款四轮足机器人W1
逐际动力四轮足机器人W1拥有颠覆性的技术和产品能力
针对通用足式机器人,逐际动力全自研高性能关节,让W1得以把四腿和四轮相结合的复合能力发挥到极致,实现了高动态运动与全地形越障能力,比单纯的四足机器人更加高效、敏捷,更适用于大部分的落地应用场景。
W1是中国首个能够搭载逐际动力基于感知的运动控制等核心算法的四轮足产品。它成功攻克了楼梯等难度极高的离散地形,能够覆盖绝大多数非轮式的复杂场景。通过实时步态规划与控制,W1基于自主地形感知,能够完成上下楼梯的任务
得益于天生的形态优势和一流的软硬件能力,W1具备了出色的移动效率、负载能力和续航里程,真正满足客户现实的使用要求。
 逐际动力四轮足机器人W1具备出色的运动能力
逐际动力四轮足机器人W1具备出色的运动能力
目前,逐际动力四轮足机器人W1已成功通过多个复杂应用场景的能力验证,为落地应用做好充分的准备。
- 高动态运动:全自研高性能关节,释放出四轮足复杂结构的超级运动能力
- 上下楼梯:融合感知的运动控制,实现了轮足稳定踏步上下楼梯
- 上下斜坡:身体与斜坡面、地面皆可保持水平,按需灵活切换
- 马路牙子:灵活自由切换运动步态,轻松应对各类不同离散地形的挑战
- 伏地穿越:在高速运动过程中,自由调整身体高度,适应不同作业环境的需求
- 单边桥:让机器人适应地形,而不是地形适应机器人,不管地形如何变化,始终做到如履平地
- 草地石板路:通过颠簸路面时,腿部多关节快速协同响应,降低机身姿态波动
- 碎石路:巧妙的轮足结构可踏可滚,兼顾了足式的高通过性和轮式的高效率
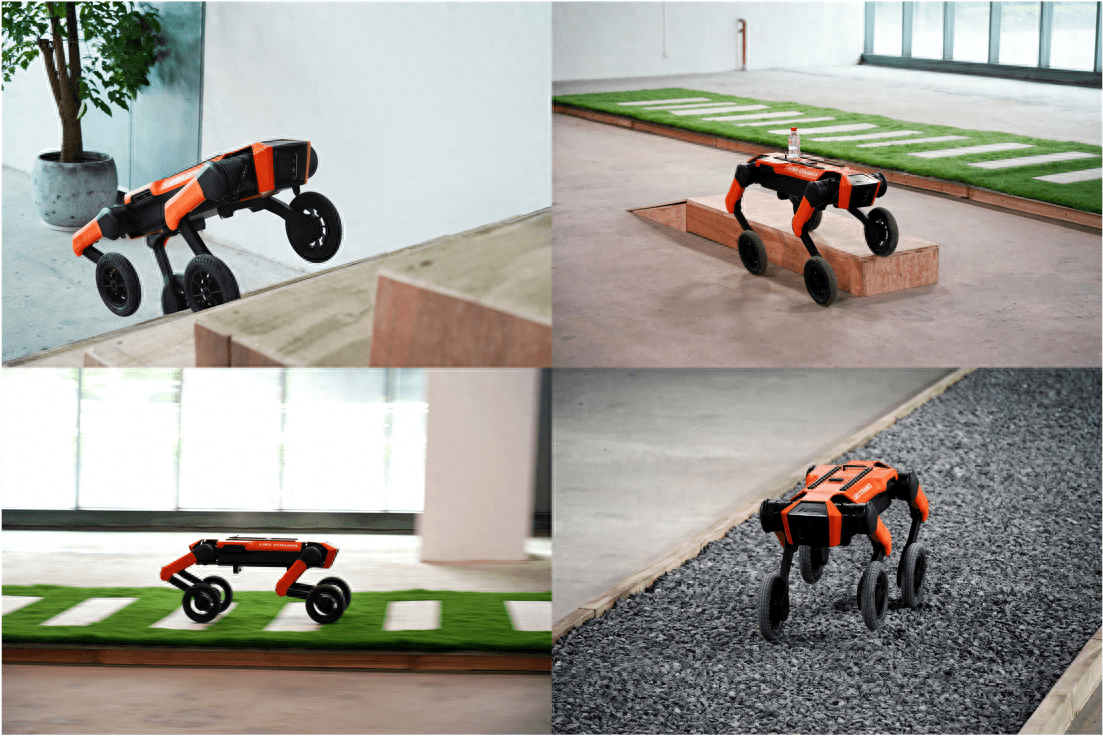 逐际动力四轮足机器人W1成功通过多个复杂应用场景的能力验证
逐际动力四轮足机器人W1成功通过多个复杂应用场景的能力验证
四轮足机器人需要具备几乎四足机器人所有的能力,但是轮足混合带来的感知干扰、状态估计和运动控制的挑战却成数倍增加,全球没有成熟的方案,难度极大,逐际动力要充分发挥轮足这一复合形态的优势,必须解决学术和产业界长期面临的难题。
逐际动力全方位掌握足式机器人运动智能的核心技术,利用在地形感知、强化学习、多刚体动力学、混杂动力学、模型预测控制等领域的学术和研发经验,建立领先的感知与控制融合的算法框架,实现更高稳定性、更强实时性的控制能力。
为了实现从样机到产品的飞跃,机器人与环境的实时交互至关重要。逐际动力从创立之初就将感知能力与运动控制的结合作为核心技术进行攻关,并根据软件算法定义硬件。我们全自研高性能关节,让四轮足机器人的优异物理运动能力得以充分发挥
逐际动力创始人张巍博士表示,通用足式机器人目前正处于技术爆发期,基础研究和商业化正在不断交融并扩大。在适当的时机,我们选择了四轮足机器人W1作为首款主打产品,旨在打造具备全地形移动能力的高效通用底盘。这款产品是一个突破性的创新,定位于技术、应用和市场的最佳交集点。通过一流的技术,我们解决了长期以来困扰足式机器人落地的难题,使足式机器人真正进入产业领域并创造价值
产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- gate.io如何买狗狗币
- 在Gate.io购买狗狗币的步骤包括:1.注册账户;2.入金资金;3.前往交易页面购买狗狗币(限价单或市价单)。请注意,加密货币市场波动较大,投资前请谨慎。
- 1分钟前 0
-
 正版软件
正版软件
- 有人欢喜,有人忧,香港的现货加密ETF惨不忍睹
- 最近关于美帝要通过以太坊现货ETF的消息闹得沸沸扬扬,以太坊也应声大涨20%。其实早在上个月,香港就率先批准了以太坊的现货ETF,当时对以太坊的价格完全没有任何波澜在以太坊暴涨的背景下,昨天香港三家机构的以太坊现货ETF净流入也只有62.8个。这个表现甚至还不如我币安广场上的一个散户粉丝:香港的以太坊ETF也不仅仅是昨天表现不行,而是自从发行以来就一直不太行:除了发行第一台有一些流入之外,剩下长时间感觉就在左右手倒腾刷交易量。不仅以太坊ETF是这个样子,比特币的ETF也是这样:除了第一天有三千多个比特币的
- 21分钟前 0
-
 正版软件
正版软件
- 币安里怎么购买狗狗币
- 可以通过以下步骤在币安购买狗狗币:1.创建一个币安账户;2.为账户注资;3.搜索狗狗币;4.下单,输入购买数量或金额;5.确认并完成购买。
- 31分钟前 0
-
 正版软件
正版软件
- fx币未来走势如何
- FX币的未来走势取决于多种因素,包括市场情绪、法规环境、竞争对手、技术发展和全球经济状况。基于这些因素,可能的未来走势包括看涨情景(价格大幅上涨)、看跌情景(价格大幅下跌)和中性情景(价格保持稳定)。
- 51分钟前 0
-
 正版软件
正版软件
- 波场币会涨到多少钱
- 波场币未来涨幅取决于技术进展、生态系统增长、行业采用、市场情绪和竞争。专家预测,到2023年,其价值可能介于0.15美元至0.25美元之间,到2025年可能介于0.50美元至1.0美元之间,到2030年可能介于2.0美元至5.0美元之间,但需要注意的是,这些只是预测,实际涨幅可能因各种因素而异。
- 1小时前 18:14 0
最新发布
-
 1
1
- 阿里追捧的中台,“热度”退了?
- 1983天前
-
 2
2
- Overture设置踏板标记的方法
- 1820天前
-
 3
3
- 思杰马克丁取得CleanMyMac中国区独家发行授权
- 1810天前
-
 4
4
- IBM:20万台Mac让公司职工在工作中更快乐 更多产
- 2008天前
-
 5
5
- 报道称微软一直在悄然游说反对“维修权”立法!
- 1974天前
-
 6
6
- 美国怀疑华为窃取商业机密 华为:身正不怕影子斜
- 1970天前
-
 7
7
- 三星被曝正与联发科接洽 A系列手机有望搭载其5G芯片
- 1985天前
-
 8
8
- 环球墨非完成千万级融资 联合企业集团投资
- 2006天前
-
 9
9
相关推荐
热门关注
-

- Xshell 6 简体中文
- ¥899.00-¥1149.00
-

- DaVinci Resolve Studio 16 简体中文
- ¥2550.00-¥2550.00
-

- Camtasia 2019 简体中文
- ¥689.00-¥689.00
-

- Luminar 3 简体中文
- ¥288.00-¥288.00
-

- Apowersoft 录屏王 简体中文
- ¥129.00-¥339.00