MIT类人机器人后空翻绝技,你觉得怎么样?
 发布于2025-05-18 阅读(0)
发布于2025-05-18 阅读(0)
扫一扫,手机访问
机器之心报道
机器之心编辑部
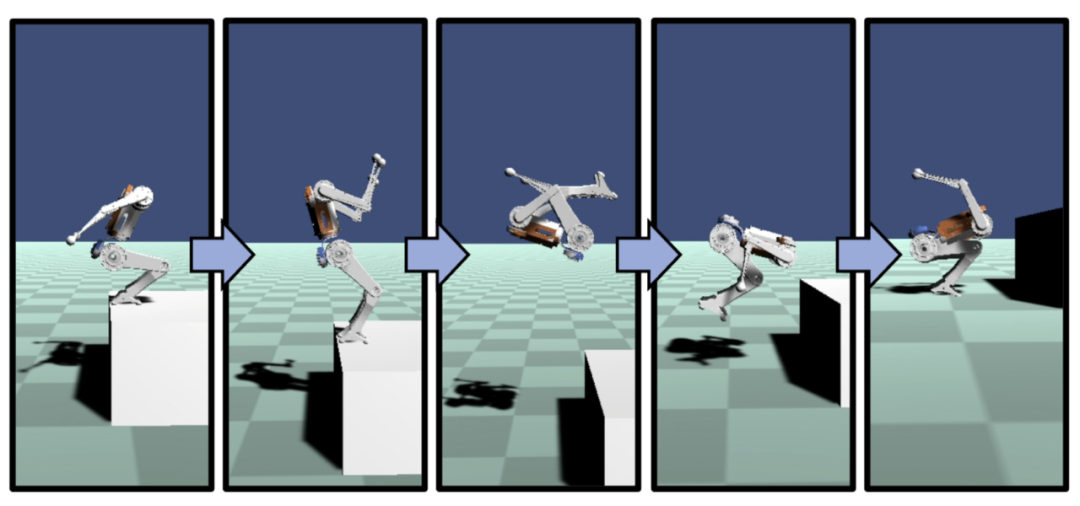
设计一个能执行后空翻、旋转跳跃、跨越障碍物的机器人是极具挑战性的任务,因为这些机器人通常需要复杂的硬件设计、运动规划和控制算法。
在后空翻领域,最著名的机器人选手是来自波士顿动力的 Atlas。它能单脚站立、翻跟斗,甚至表演芭蕾舞步,但关于 Atlas 背后的技术秘密,人们了解甚少。
 最近,麻省理工学院和马萨诸塞州大学阿默斯特分校的研究人员设计了一种能够执行后空翻等多种杂技动作的新型类人机器人,并提出了设计核心——执行器感知动力学运动规划器和着陆控制器,目前相关论文已上传至 arXiv 平台。
最近,麻省理工学院和马萨诸塞州大学阿默斯特分校的研究人员设计了一种能够执行后空翻等多种杂技动作的新型类人机器人,并提出了设计核心——执行器感知动力学运动规划器和着陆控制器,目前相关论文已上传至 arXiv 平台。
 论文链接:https://arxiv.org/pdf/2104.09025.pdf
论文链接:https://arxiv.org/pdf/2104.09025.pdf
负责机器人软件和控制器开发的研究者 Donghyun Kim 表示:「在这项工作中,我们试图提出一种控制算法,使类人机器人能够执行各种杂技动作。为此,我们首先通过实验确定了执行器的性能和运动规划器的主要限制。」
 为了执行高度动态的行为,机器人通常需要有效利用执行器。大多数现有机器人设计无法完全解决与硬件相关的挑战,例如在高扭矩、高速运动期间可能发生的电压下降。
为了执行高度动态的行为,机器人通常需要有效利用执行器。大多数现有机器人设计无法完全解决与硬件相关的挑战,例如在高扭矩、高速运动期间可能发生的电压下降。
正如 Donghyun Kim 所说:「对于机器人来说,执行动态运动是一项挑战,因为操作员必须首先了解硬件和软件之间的关系。我们基于对机器人硬件积累的经验和知识,尝试使用控制算法来解决动态运动中的关键硬件限制。」
Donghyun Kim 及其合作者开发了一种新方法,可以处理在运动规划和控制过程中与高度动态的机器人行为相关的约束。结合他们提出的机器人设计,就可以实现更多如杂技表演的动态运动。
这一新型的类人机器人与过去开发的其他类人机器人之间最明显的区别在于执行器。研究者通过几款四足机器人,包括 MIT Cheetah 猎豹 1、2、3 以及 mini Cheetah 机器人的出色性能,证明了执行器技术的显著改进。新型的类人机器人应用了相同的执行器技术,具有高度可反向驱动、快速精确的扭矩控制等特点,以及紧凑坚固的外形。
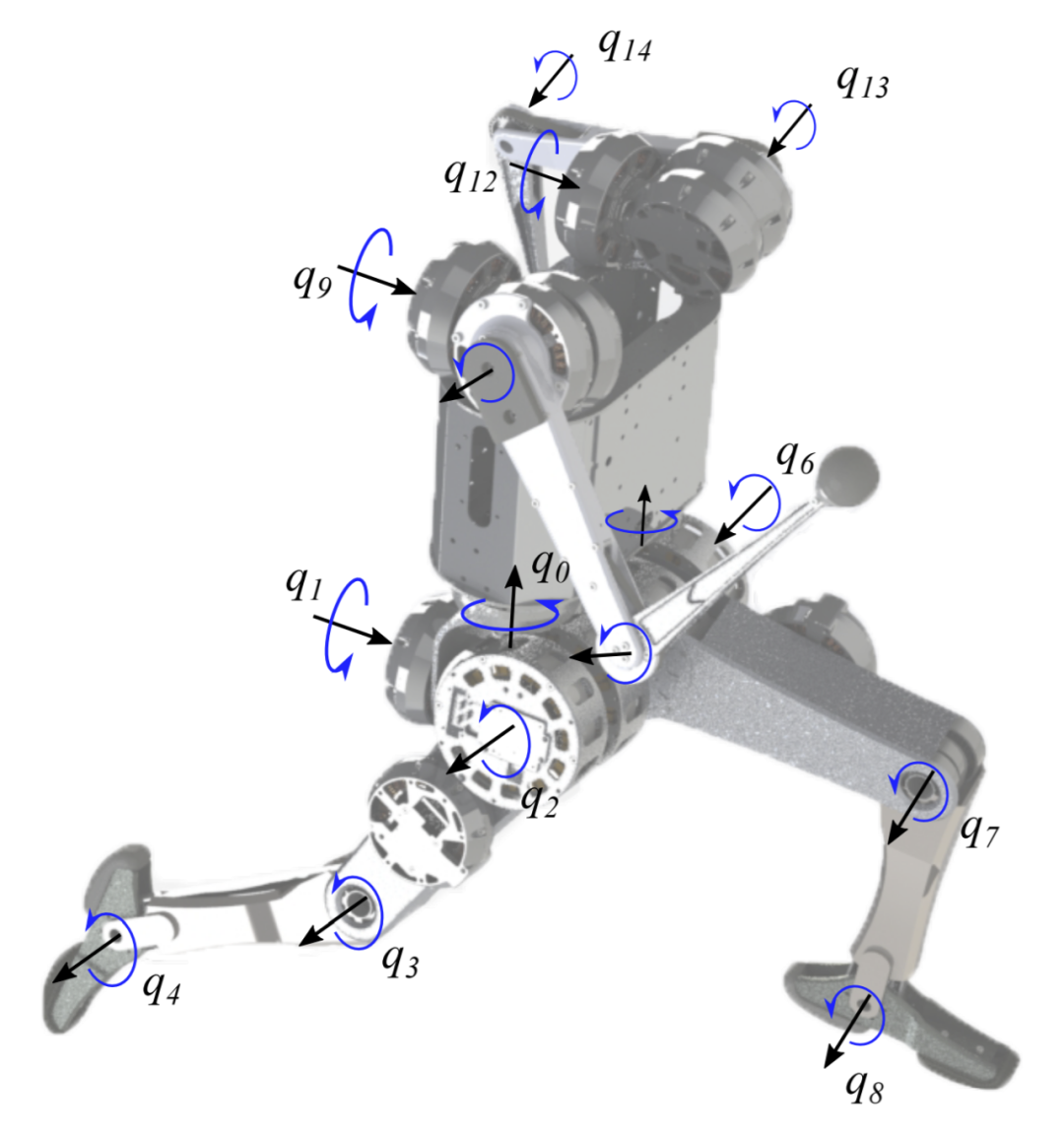
具体而言,MIT Cheetah 机器人的设计独特地结合了扭矩密集型电动机、高带宽力控制以及通过反向驱动减轻影响的能力。这种设计范式允许机器人产生将自身推进到空气中所需的脉冲,同时还提供机械鲁棒性,使其能够控制在着陆时发生的高速撞击。采用了相同的设计原则,接近最终设计的虚拟模型如下图所示。
下图所示的机器人高约 0.7 m,重约 21 kg。大约 75.6% 的质量集中在机器人的躯干、肩部和臀部,22.5% 在机器人的腿,其余 1.9% 在机器人的手臂。机器人的每条腿都有五个定制的执行器:三个用于臀部,一个用于膝盖,一个用于脚踝的间距。膝关节、踝关节和肘关节包含一个皮带传动系统,可在这些关节处提供更高的扭矩。每条腿可以在每只脚上产生 3D 地面反作用力以及围绕每只脚的俯仰轴和偏航轴的力矩,执行器设置详见下图。系统将由高性能 60V、3Ah 电池组供电,四个无线接触传感器被安装在每只脚的脚后跟和脚趾上,以检测接触时间。
 随后,Donghyun Kim 和他的同事在仿真中测试了他们的机器人设计、运动规划器、着陆控制器以及各种杂技行为。
随后,Donghyun Kim 和他的同事在仿真中测试了他们的机器人设计、运动规划器、着陆控制器以及各种杂技行为。
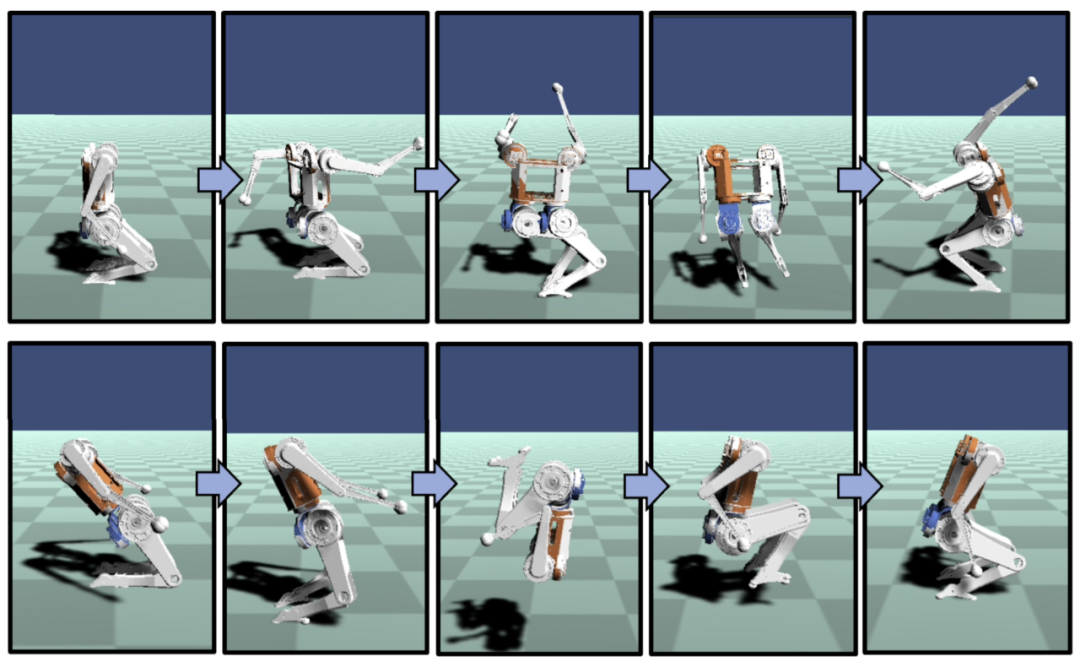 高效完成各种复杂任务是将来 MIT 类人机器人研发的目标。同时,研究人员计划在现实世界中测试他们的设计、运动规划器、控制算法。
高效完成各种复杂任务是将来 MIT 类人机器人研发的目标。同时,研究人员计划在现实世界中测试他们的设计、运动规划器、控制算法。
「我们会继续在真实的机器人中测试开发的控制算法,并推动有腿机器人的动态能力,」Donghyun Kim 说。「我们还计划将感知系统整合到我们的控制算法中,让机器人更加能够对外部环境的变化做出响应。」
参考链接:https://techxplore.com/news/2021-05-mit-humanoid-robot-dynamic-robotic.html
迁移学习发展现状及案例探究
6月15日,机器之心最新一期线上分享邀请到本书作者、微软亚洲研究院研究员王晋东带来分享,介绍迁移学习的最新研究现状,带领大家从琳琅满目的研究工作中,寻找最本质的方法。
点击阅读原文,直达直播间。
 © THE END
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com
免责声明:正软商城发布此文仅为传递信息,不代表正软商城认同其观点或证实其描述。
产品推荐
-

售后无忧
立即购买>- DAEMON Tools Lite 10【序列号终身授权 + 中文版 + Win】
-
¥150.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Ultra 5【序列号终身授权 + 中文版 + Win】
-
¥198.00
office旗舰店
-

售后无忧
立即购买>- DAEMON Tools Pro 8【序列号终身授权 + 中文版 + Win】
-
¥189.00
office旗舰店
-

售后无忧
立即购买>- CorelDRAW X8 简体中文【标准版 + Win】
-
¥1788.00
office旗舰店
-
 正版软件
正版软件
- 4999 元起!AI影像、半固态锂电上车,雅迪冠能普及「车规级」体验
- 真正的智能骑行必须化繁为简。
- 14小时前 16:27 0
-
 正版软件
正版软件
- 突破16万辆!问界M8以硬核实力书写春季出游“全能答卷”
- 突破16万辆!问界M8以硬核实力书写春季出游“全能答卷”
- 前天 03-21 12:47 0
-
 正版软件
正版软件
- 岚图泰山黑武士太敢测!胡军坐副驾惊出15个表情包
- 岚图泰山黑武士太敢测!胡军坐副驾惊出15个表情包
- 4天前 0
-
 正版软件
正版软件
- 新豪华智慧旗舰轿车昊铂A800上市,补贴后16.48万元起
- 一款诚意之作。
- 6天前 0
-
 正版软件
正版软件
- 鸿蒙智行问界M6活力橙官图公布:高饱和度纳米色浆搭配高亮铝粉
- 问界M6推全新活力橙配色,提供7种车色,搭载激光雷达等配置,增程版纯电续航达180-272km,今春发布。
- 6天前 0
最新发布
-
 1
1
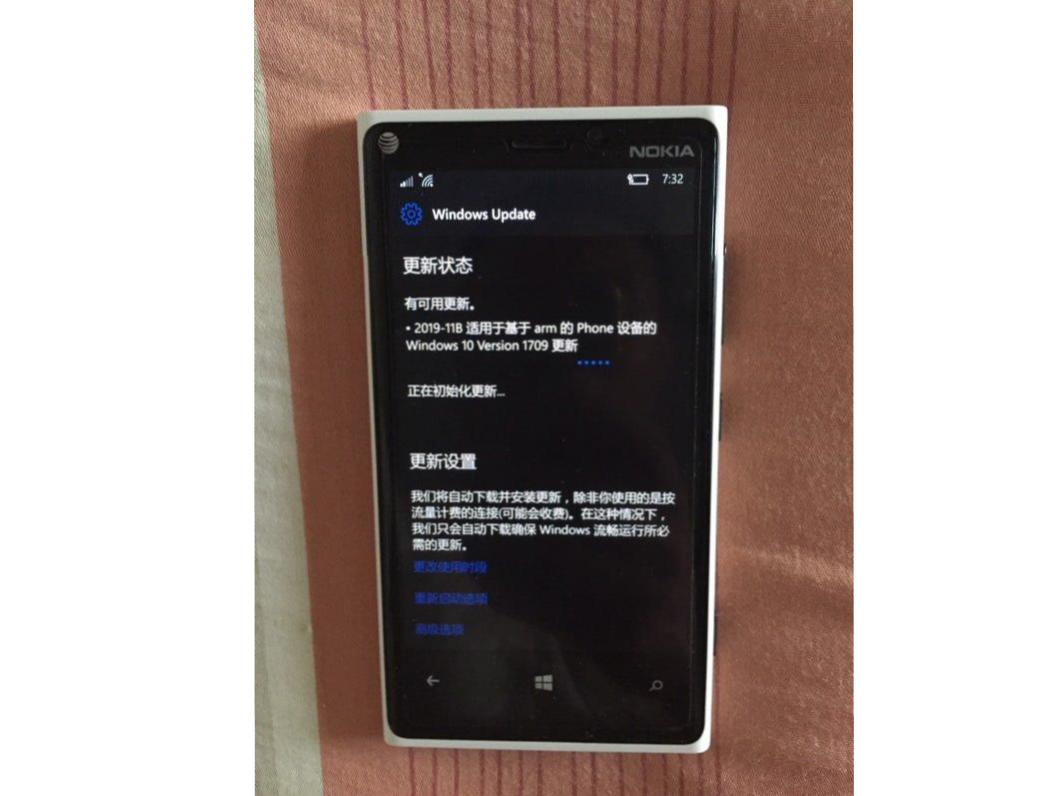
- 在哪里可以找到手机相片收藏
- 485天前
-
 2
2
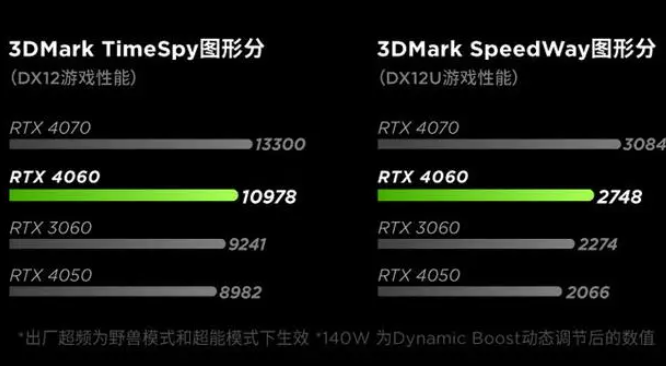
- 详细解读I7-14650HX的性能评测数据
- 493天前
-
 3
3
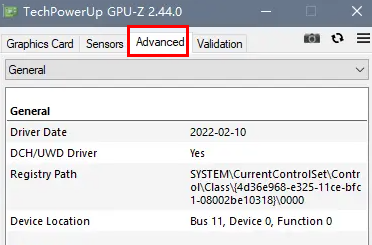
- 如何选择DP接口版本: 1.2还是1.4?
- 504天前
-
 4
4
-
 5
5
- 华为GT4和Watch4,哪个更好?
- 795天前
-
 6
6
-
 7
7
- 骁龙芯片的型号与天玑9400相当?
- 512天前
-
 8
8
-
 9
9
- 三星“约谈”联发科 A系列智能手机有望搭载其5G芯片
- 2290天前
相关推荐
热门关注
-

- Xshell 6 简体中文
- ¥899.00-¥1149.00
-

- DaVinci Resolve Studio 16 简体中文
- ¥2550.00-¥2550.00
-

- Camtasia 2019 简体中文
- ¥689.00-¥689.00
-

- Luminar 3 简体中文
- ¥288.00-¥288.00
-

- Apowersoft 录屏王 简体中文
- ¥129.00-¥339.00